Servomotor Control with PWM
2024-07-24 15:13:31
In the realm of precision motion control, especially in robotics and automation systems, the servomotor stands out as a workhorse due to its ability to be accurately controlled for position, speed, and acceleration. One of the most effective ways to achieve this level of control is through Pulse Width Modulation (PWM), a technique that modulates the width of pulses to adjust the power delivered to the motor. This detailed exploration dives into the fundamentals of servomotor control using PWM, underscoring its relevance and implementation.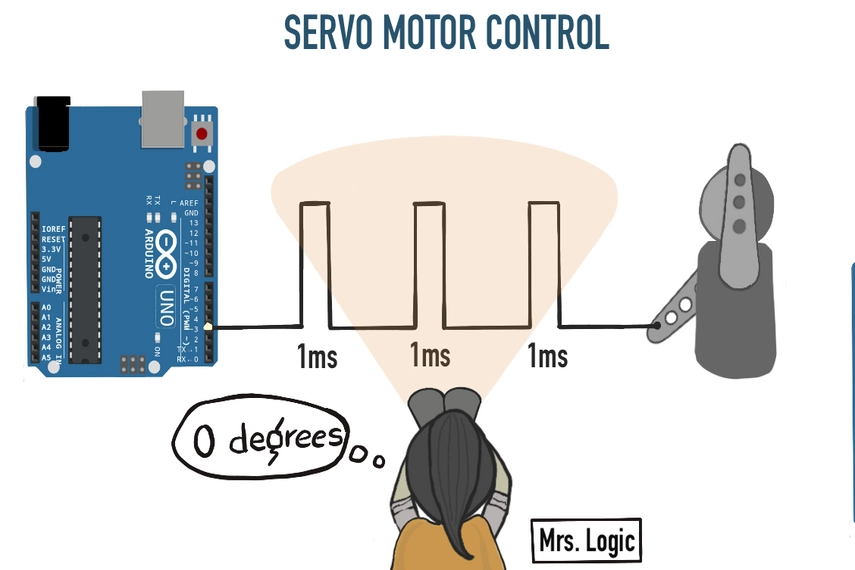
Introduction to PWM
Pulse Width Modulation (PWM) is a sophisticated modulation technique employed in electronic systems to regulate power delivery to a load. By rapidly switching a digital signal on and off at a fixed frequency, PWM allows precise control over the average power or voltage applied to the load through adjustment of the duty cycle. This method finds extensive application in areas such as motor speed control, LED dimming, and power regulation, providing notable benefits including high efficiency, enhanced control resolution, and the ability to achieve fine-grained power adjustments. PWM enables professionals in the field to optimize power utilization and achieve tailored performance in a wide range of electronic applications.
Understanding Servomotor Control with PWM
Servomotor control with PWM involves using a pulse width modulated signal to accurately control the position and speed of a servomotor. PWM is a technique that modulates the width of a pulse to control the average power delivered to a load. By altering the pulse width within a specific range, the rotational position of the servomotor can be adjusted precisely.
Principles of PWM Control
When it comes to PWM control, the servomotor and controller are indispensable.The PWM control of servo motors mainly involves the following aspects:
- Generating the Control Signal: A control signal is generated using a microcontroller or other suitable electronic devices capable of producing PWM signals. The control signal is typically a square wave with a fixed frequency.
- Defining the Pulse Width: The pulse width of the control signal determines the position of the servomotor. By varying the pulse width between minimum and maximum values, the servomotor can be positioned at different angles within its rotational range.
- Duty Cycle Calculation: The duty cycle represents the percentage of time the pulse is on compared to the total time of one cycle. It determines the average power delivered to the servomotor. The duty cycle is calculated using the desired position and the pulse width range of the servomotor.
- Feedback Control: Servomotors often incorporate a feedback mechanism, such as a potentiometer, to provide information about the actual position of the motor. This feedback allows for closed-loop control, where the control signal is adjusted based on the feedback to achieve the desired position accurately.
Benefits of PWM Control for Servomotors
Controlling a servomotor using PWM involves adjusting the duration of the "on" pulse to control the angle to which the servo arm moves. This is due to the fact that the position commanded to the servo is determined by the duration of the pulse (usually in milliseconds). A typical servomotor expects to receive a pulse roughly every 20 milliseconds, with the length of the pulse dictating how far the motor turns. For instance, a pulse of 1.5 milliseconds will make the motor turn to the 90-degree position (neutral position). Servomotor control with PWM offers several advantages:
- Precise Position Control: PWM control allows for precise positioning of the servomotor, enabling accurate control over the angular position.
- Adjustable Speed: By varying the duty cycle of the PWM signal, the speed of the servomotor can be adjusted, providing flexibility for different application requirements.
- Low Power Consumption: PWM control minimizes power wastage by delivering power to the servomotor in short pulses, reducing energy consumption and increasing overall efficiency.
- Reduced Heat Generation: The intermittent power delivery through PWM control helps in reducing heat dissipation, enhancing the longevity and reliability of the servomotor.
- Compatibility: PWM control is compatible with various servomotor types, making it a versatile and widely used technique in the industry.
Application Examples
The use of PWM control for servomotors finds application in various domains:
- Robotics: Servomotors with PWM control are extensively used in robotic systems for precise control of joint movements.
- Automation: PWM-controlled servomotors are employed in industrial automation for accurate positioning and control of machinery.
- Aerospace and Defense: Servomotors with PWM control are utilized in aerospace and defense applications for controlling various mechanisms, such as flaps and landing gear.
- Hobby and Model Making: PWM control is popular among hobbyists and model enthusiasts for controlling servomotors in remote-controlled vehicles, drones, and other model-making projects.
Conclusion
Servomotor control using PWM represents a robust method for achieving precise motion control in various applications, from robotics to industrial automation. By generating a pulse width modulated signal and adjusting the pulse width within a specific range, servomotors can be accurately controlled. However, it requires a deep understanding of both the servo mechanism and the intricacies of PWM signal generation and application.
Other Products





See What Lunyee Can Do For You
Contact Us
- 8619149417743
- +86-0371-5562 0274
- [email protected]
- Zhengzhou, Henan Province, China
- Mon-Fri: 9:00 - 18:00